软件安装与环境配置
- SetupSTM32CubeMX-6.2.0-Win.exe:STM32CubeMX 本体,免费
- jre-8u211-windows-x64.exe:JAVA 环境,免费
- MDK521A.exe:Keil5,开发环境,收费
- Keil.STM32F4xx_DFP.2.9.0.pack:F429 芯片支持包
- keygen_new2032.exe:破解 Keil5
- XCOM V2.3.exe:串口调试助手(正点原子开发)
GPIO 开发基础
- STM32 最多拥有 GPIOA、GPIOB……GPIOG 等 7 组端口。每组端口最多拥有 Pin0、Pin1……Pin15 共 16 个引脚。(最多拥有 7 * 16 = 112 个引脚)(有的引脚会直接命名为 PA3、PB3 这种,是端口和引脚号写在了一起)
- STM32 的每个 I/O 端口都可以自由编程,但 I/O 端口寄存器必须按 32 位字被访问。
- STM32 的每个 I/O 端口都由 7 个寄存器控制。
- STM32 的 I/O 端口可以由软件配置成 8 种模式。(通过 STM32CubeMX 里的图像化界面,配置好功能,直接生成初始化代码)
- 输出
- 推挽输出:指普通的高低电平输出。
- 开漏输出
- 推挽式复用功能
- 开漏式复用功能
- 输入
- 模拟输入(AD 转换的模拟信号)
- 浮空输入
- 下拉输入
- 上拉输入
- 输出
三个 GPIO 输出的 HAL 库函数
GPIO 电平输出 HAL 库函数
1
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
- GPIOx:目标引脚的端口号(填 A、B、C……)。
- GPIO_Pin:目标引脚的引脚号。
- PinState:高电平
GPIO_PIN_SET;低电平GPIO_PIN_RESET。
【例】:向 PB8 引脚输出高电平。
1
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
GPIO 电平翻转 HAL 库函数
1
void HAL_GPIO_TogglePin(GPIO_Type* GPIOx, unit16_t GPIO_Pin);
【例】:将 PA3 引脚输出电平翻转。
1
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_3);
GPIO 电平输入 HAL 库函数
1
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); //具有返回值
【例】:判断 PC13 引脚的输入信号,若为高电平,则将 PB9 引脚控制的 LED 等的开关状态切换。
1
2
3
4if(HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_13) == GPIO_PIN_SET)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_9);
}
GPIO 的重要数据结构
(待补充)
实训:跑马灯实现流程
打开 STM32CubeMX 软件。
选择对应的 MCU:
ACCESS TO MCU SELECTOR。把自己开发板芯片的型号输入到搜索框中,选中后,点击
Start Project。进行基本配置。
- System Core,SYS。配置仿真口。可选择
SW或JTAG口。 - System Core,RCC。配置时钟。选完后可以看到有针脚变颜色。然后还需配置时钟树。
- System Core,SYS。配置仿真口。可选择
配置 LED 灯所对应的针脚。每个针脚只能选一个功能。
配置完成后。对项目进行命名。选择开发环境
MDK-ARMV5。在代码器(Code Generator)勾选 Generate peripheral initialization as a pair of ‘.c/.h’ files per peripheral。点击右上角GENERATE CODE。打开文件夹,在 MDK-ARM 文件夹中,找到带有 Keil5 工程图标的文件,双击打开。
打开项目后,先进行一次编译,目的是检查默认代码有没有问题,同时把
main.c文件相关的头文件关联出来。应用代码写在以下注释中间。重新配置工程文件时,放在这里面的代码会被保留下来,其他代码会覆盖掉。
1
2
3/* USER CODE BEGIN 0 */
/* USER CODE END 0 */在
int main(void)中的MX_GPIO_Init()写代码。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19/* Infinite loop */
/* USER CODE BEGIN WHILE */
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* LED0 RED 闪烁,方式 1,写高低电平。阿波罗的板子,低电平亮,高电平灭 */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
HAL_Delay(1000);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
HAL_Delay(1000);
/* LED0 RED 闪烁,方式 2,写翻转电平 */
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_1);
HAL_Delay(200);
}
/* USER CODE END 3 */编译后,下载到开发板上。按下开发板的复位键,可以看到
LED0 RED闪烁。
STM32 的按键开发基础
基本原理
- 按键信号的识别:一般来说,按键的两个引脚的一端通过电阻上拉到高电平,另一端则接地。没有按键按下时,输入引脚为高电平。当有按键按下,输入引脚则为低电平。通过反复读取按键输入引脚的信号,然后识别高低电平来判断是否有按键触发。
- 去抖动:按键的输入引脚有低电平产生不代表一定是有按键按下,也许是干扰信号。因此需要通过去抖动处理将这些干扰信号过滤,从而获得真实的按键触发信号。方法:首次检测到按键输入引脚有低电平后,稍作延时,再次读取该引脚,如果还是低电平,则确认有按键触发信号;否则,判断为干扰信号,不予处理。
实训:按键控制 LED 灯开关
利用 STM32CubeMX 和 Keil5 进行 STM32 应用开发,完成以下功能:
- 按下 KEY0(PH3)按键,松开后,切换 LED0(PB1)的开关状态。
- 按下 KEY1(PH2)按键,切换 LED1(PB0)的开关状态。
- 按下 KEY2(PC13)按键,把点亮的 LED 灯全部关闭。
1 | /* USER CODE BEGIN 0 */ |
STM32 的中断系统与外部中断基础
名词扫盲
- 中断:
- 中断源:
- 中断向量:
- 中断优先级:
- 中断服务函数:
中断系统
ARM Cortex M3 内核支持 256 个中断,包括 16 个内核中断和 240 个外设中断,拥有 256 个中断优先级别。
STM32 的中断通道可能会由多个中断源共用。这就意味着,某一个中断服务函数也可能被多个中断源所共用。所以,在中断服务函数的入口处,需要有一个判断机制,用以辨别是哪个中断出发了中断。
STM32 中有 2 个优先级的概念:抢占优先级和响应优先级,每个中断都需要指定这两种优先级。
Cortex M3 内核中有一个称为嵌套向量中断控制器(NVIC)的设备,对中断进行统一的协调和控制。其中最主要的工作就是控制中断使能和确定中断优先级。
外部中断
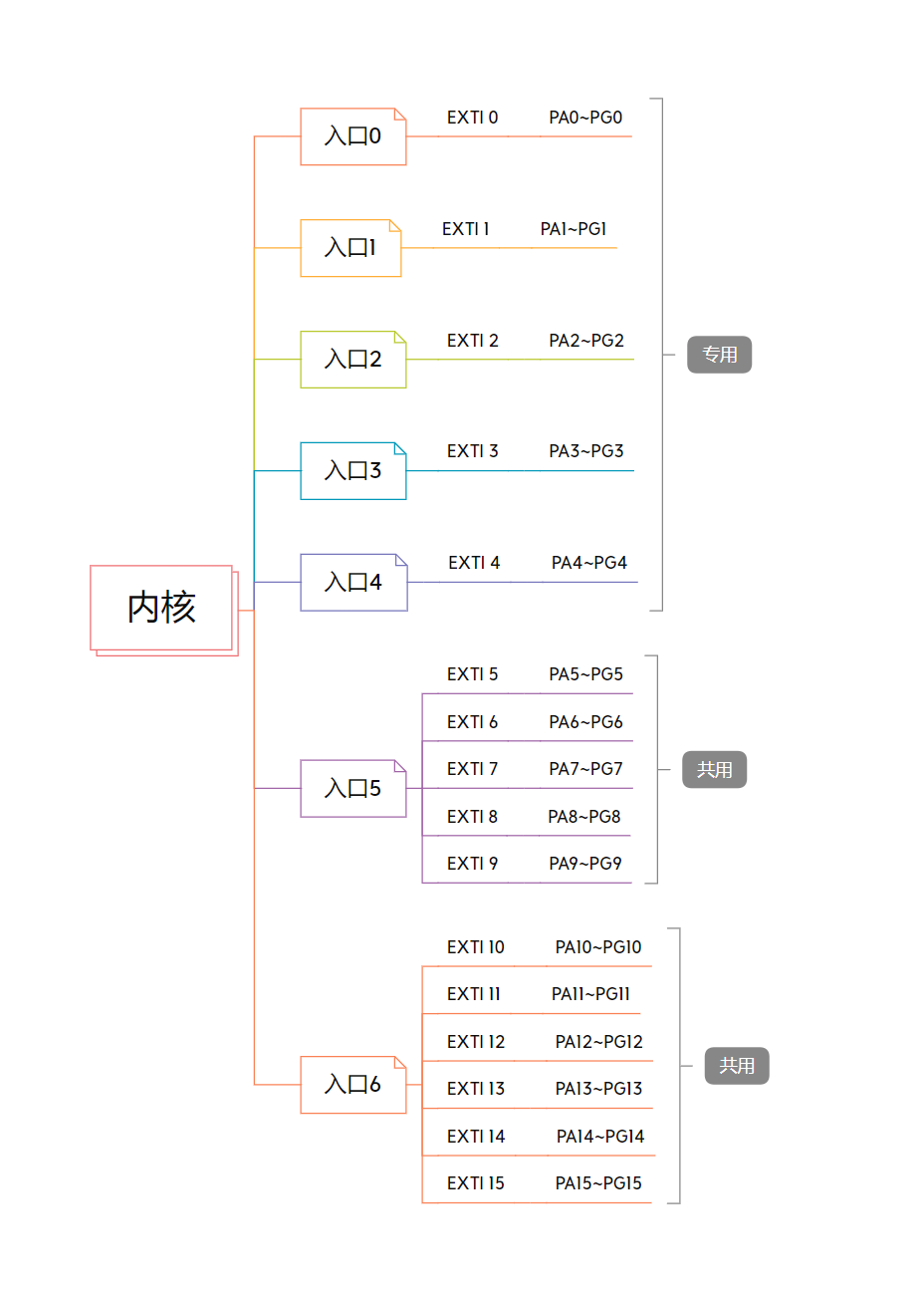
外部中断 EXTI 是 STM32 芯片实时处理外部事件的一种机制,由于中断请求来自 GPIO 端口的引脚,所以称为外部中断。
STM32 芯片有 16 个外部中断源 EXTI0~EXTI15,分别对应这 7 个中断向量,也就是对应着 7 个中断服务函数。
- EXTI0、1、2、3、4:专用。(5:5)
- EXTI5~9:共用。(5:1)
- EXTI10~15:共用。(6:1)
EXTI0 的连接引脚是:PA0~PG0,即每个端口组的 0 号引脚。以此类推。
外部中断触发条件:上升沿触发、下降沿触发或双边沿触发。注意:不能配置成高电平触发和低电平触发。
外部中断的程序设计思路:
传统的:
- 将 GPIO 初始化为输入端口。
- 配置相关 I/O 引脚与中断线的映射关系。
- 设置该 I/O 引脚对应的中断触发条件。
- 配置 NVIC,并使能中断。
- 编写中断服务函数。
基于 STM32CubeMX 的外部中断设计步骤:
- 在 STM32CubeMX 中指定引脚,配置中断初始化参数。
- 重写该 I/O 引脚对应的中断回调函数。
【例】将 PC13 引脚设置为外部中断,下降沿触发,在中断服务函数中,翻转 PB9 引脚的电平信号。1.
- 初始化配置
- 将 GPIO 设置为:GPIO_EXTI 功能。
- 设置中断触发条件:上升沿、下降沿、上升沿或下降沿。
- 使能相关的 NVIC 通道。
- 中断服务函数编写
实训:外部中断信号控制 LED 灯开关
利用 STM32CubeMX 和 Keil5 进行 STM32 应用开发,完成以下功能:
- 将 KEY0,即 PH3 设置为外部中断输入,下降沿触发。在中断服务函数中,切换 LED0(PB1)的开关状态。
- 将 KEY1,即 PH2 设置为外部中断输入,上升沿触发。在中断服务函数中,切换 LED1(PB0) 的开关状态。
【注】这个题目的代码很简单,重写虚函数(weak void)即可。主要在于 STM32 中的参数配置,这里折腾了很久,调试经验如下:
- 配置 RCC:选择 Crystal/Ceramic Resonator 即可,不需要去 Clock Configuration 中进行修改。(原理之后学到来补充,占坑)
- 配置 GPIO:上升/下降沿分别是 External Interrupt Mode with Rising/Falling edge trigger detection。一定都选择上拉(Pull-up)。
- 最后按键按的时候,可能会出现时亮时不亮,这是因为没有进行按键消抖,触发两次或者是没有触发。
1 | /* USER CODE BEGIN 0 */ |
STM32 的定时器开发基础
常见定时器资源
系统嘀嗒定时器 SysTick
集成在 Cortex M3 内核。
看门狗定时器 WatchDog
实时时钟 RTC
基本定时器:TIM6、TIM7
通用定时器:TIM2、TIM3、TIM4、TIM5
在基本定时器的基础上,实现输出比较、输入捕获、PWM 生成、单脉冲模式输出等功能。这类定时器最具代表性,使用也最广泛。
高级定时器:TIM1、TIM8
通用定时器
STM32 的通用定时器是一个通过可编程预分频器(Prescaler)驱动的 16 位自动重装主计数器(Counter Period)构成。可以对内部时钟或触发源以及外部时钟或触发源进行计数。
基本工作原理
首先,定时器时钟信号送入 16 位可编程预分频器(Prescaler),该预分配器系数为 0~65535 之间的任意数值。预分配器溢出后,会向 16 位的主计数器(Counter Period)发出一个脉冲信号。
预分频器,本质上是一个加法计数器。预分频系数实际上就是加计数的溢出值。
定时器发生中断时间的计算方法
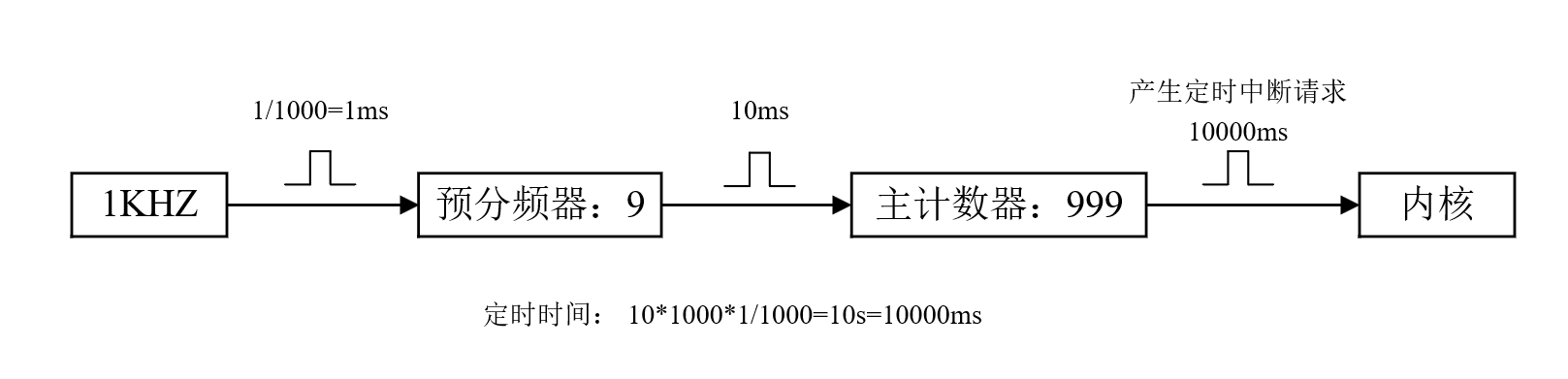
定时时间 = (Prescaler + 1)X(Counter Period + 1)X 1/定时器时钟频率S
【例】时钟信号 1KHz,Prescaler 为 9,Counter Period 为 999,定时时间?
STM32CubeMX 中关于 TIM 的配置
【例】时钟信号 32MHz,每隔 500ms 翻转一次 PB9 的输出电平
- 设置 Clock Source 时钟源
- 设置 Prescaler 和 Counter Period 参数
- 设置 NVIC 嵌套向量中断控制器
如何得到 500ms:32000 X 500 X 1/32000000 = 0.5s = 500ms
因此,Prescaler 为 31999,Counter Period 为 499。
时钟树相关知识
- STM32F429 时钟源
- HSI:高速内部时钟,RC 振荡器,16MHz
- LSI:低速内部时钟,RC 振荡器,32KHz
- HSE:高速外部时钟,4-26MHz
- LSE:低速外部时钟,32.768KHz
- 系统时钟 SYSCLK 来源
- HSI
- HSE
- PLL(Phase Locked Loop):锁相环。用来统一整合时钟信号。
- 其他常用名词扫盲
- AHB(Advanced High-performance Bus)总线
- APB(Advanced Peripheral Bus)总线
- HCLK:AHB 总线的时钟。
- PCLK1:APB1 总线的时钟
- PCLK2:APB2 总线的时钟
- RTC 实时时钟:一个独立的定时/计数器。
实训:外部中断信号控制 LED 灯开关
在 STM32F429 进行 STM32 应用开发,完成以下功能:
- 利用 TIM2 实现间隔定时,每隔 0.2s 将 LED0(PB1)的开关状态翻转。
- 利用 TIM3 实现间隔定时,每隔 1s 将 LED1(PB0)的开关状态翻转。
- 修改 TIM2 的初始化代码,改为每隔 0.5s 将 LED1 的开关状态翻转。(在
time.c文件中,找到 TIM2 的配置代码void MX_TIM2_Init(void),把对应的htim2.Init.Period = 199;修改为 500 即可。
【注】同样代码很简单,把虚函数放到 main.c 文件中重写即可。主要是在 STM32CubeMX 中配置 TIM2、TIM3。
- 找到 TIM2/3,首先 Clock Source 设置为 Internal Clock;
- 因为是 32MHz,所以 Prescaler = 31999。
- 因为是 0.2s,所以 Period = 199(200ms -1)。
- 最后一定要勾选上 NVIC。
另外,写完虚函数后,要在 main 函数中启动 TIM2、TIM3。
1 | /* USER CODE BEGIN 0 */ |
STM32 的串口数据收发基础
名词扫盲
并行/串行通信
单工、半双工、全双工
异步串行通信:通信双方在没有同步时钟的前提下,将一个字符(包括特定的附加位)按位进行传输的通信方式。
波特率:每秒钟传输的二进制位数,如 9600bps。
TTL电平←→RS232:MAX3232 SP3232
串口←→USB 接口:CH340 CP2012
STM32 芯片的串口 USART 功能十分强大,但对于日常编程而言,使用最多的还是异步串行通信。
STM32CubeMX 中关于 USART 的配置
(待补充)
HAL 库中串口发送的重要函数
阻塞式发送函数(推荐使用)
1
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, unit32_t Timeout);
非阻塞式发送函数
1
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
发送完毕中断回调函数
1
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
【例】使用非阻塞式的串口发送函数,将发送缓存数组 dat_Txd 中的前 5 个数据发送到 USART1,在数据发送完成后,翻转 PB9 引脚的输出电平。
1 | HAL_UART_Transmit_IT(&huart1, dat_Txd, 5); |
HAL 库中串口接收的重要函数
阻塞式发送函数(不推荐使用)
1
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, unit32_t Timeout);
非阻塞式发送函数(推荐使用)
1
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
接收完成中断回调函数
1
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
【例】使用非阻塞式的串口接收函数,接收USART1中的一个字节,将其保存在 dat_Rxd 变量中,在数据发送完成后,若该字节为 0x5A,则翻转 PB8 引脚的输出电平。
1 | HAL_UART_Receive_IT(&huart1, &dat_Rxd, 1); |
实训:外部中断信号控制 LED 灯开关
在 F429 中进行 STM32 应用开发,完成以下功能。
- 开机后,向串口 1 发送”Hello World!”。
- 串口 1 收到字节指令”0xA1”,关闭 LED0(PB1),发送”LED1 Closed!”。
- 串口 1 收到字节指令”0xA2”,打开 LED0(PB0),发送”LED1 Open!”。
- 在串口发送过程中,打开 LED1 作为发送数据指示灯。
1 | /* USER CODE BEGIN 0 */ |
STM32 的定时器与串口综合训练
关于常用函数 sprintf() 的用法
sprintf(),指的是字符串格式化函数,把格式化的数据写入某个字符串中。
1
int sprintf(char*string, char *format[,argument,…]);
需要引用头文件:#include “stdio.h”。
【例】有一个表示温度的整型变量 tmp,现在要将其格式化为字符串“温度是:XX 摄氏度”,并将其通过串口 1 发送出去。
1 | uint8_t Str_buff[64]; |
实训:定时器与串口综合训练
在 F429 中进行 STM32 应用开发,完成以下的功能。
开机后,LED0 与LED1 依次点亮,然后熄灭,进行灯光检测。(LED0 接到 STM32 的 PB1,LED1 接到 STM32 的 PB0,低电平点亮)
系统通过串口 1 向上位机发送一个字符串”STM32F429 欢迎您!”。
LED0 作为一个秒闪灯,系统向上位机发送完字符串后,开始亮 0.5 秒,灭 0.5 秒……循环闪烁,并开始启动系统运行时间的记录,其时分秒格式为”XX:XX:XX”。
上位机通过一个由 3 个字节组成的命令帧控制 LED1 灯的开关。该命令帧的格式为”0xBF 控制字 OxFB”。
0xBF 为帧头,0xFB 为帧尾,控制字的定义如下:
0xA1:打开 LED1,返回信息”XX:XX:XX LED1 打开”。
0xA2:关闭 LED1,返回信息”XX:XX:XX LED1 关闭”。
其他:返回信息”XX:XX:XX 这是一个错误指令!”。
1 | /* USER CODE BEGIN 0 */ |
ADC 模数转换器的基本工作原理
数字系统基本结构
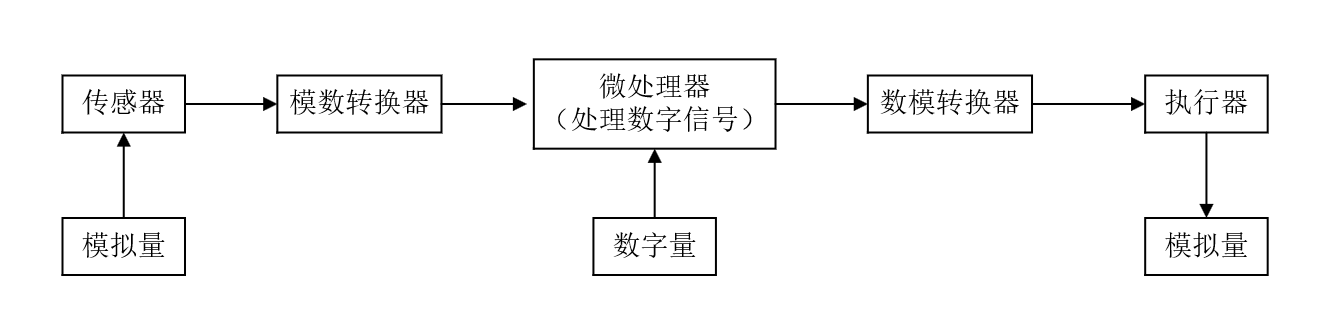
【例】一个恒温锅炉的基本结构:
- 通过温度传感器,将温度变化转换为电压变化。
- 通过 ADC 将模拟的电压变化,转换为数字变化,将其编码。
- 中央处理器根据温度数据,进行计算和逻辑控制。
- 计算结果通过 DAC 转换为电压/电流信号,控制加热和冷却。
Analog-to-Digital Converter
将时间和幅值连续的模拟量转化为时间和幅值离散的数字量,A/D 转换一般要经过采样、保持、量化和编码 4 个过程。
常用 ADC:逐次逼近型(大多数)、双积分型、$\Sigma-\Delta$ 型。
AD 转换器的几个技术指标:
- 量程(参考电压):指 ADC 所能输入模拟信号的类型和电压范围。信号类型包括单极性和双极性(差分电压)。
- 转换位数:量化过程中的量化位数 n。AD 转换后的输出结果用 n 位二进制来表示。(如 10 位 AD 的输出值为 0~1023,即 1024)
- 分辨率:ADC 能够分辨的模拟信号最小变化量。
- 公式:分辨率 = 量程 / $2^n$。(如量程为单极性 0-5V,8 位 ADC 的分辨率是:5/256 = 0.0195V,意味着能够分辨出 19.5mV 以上的信号变化)
- 转换时间:ADC 完成一次完整的 AD 转换所需要的时间,包括采样、保持、量化、编码的全过程。
ADC 数据采样的计算应用
有一个温度测控系统,已知温度传感器在 0 到 100 度之间为线性输出,参考电压为 5V,采用 8 位的 AD 转换器,0 度的时候,测的电压是 1.8V,100 度的时候,测的电压是 4.3V。问:系统的分辨率是多少?采集到数据 10010001,表示多大电压?温度是多少?
最小能分辨的电压:0.0195V。
由于温度是线性变化,先求得斜率 K = (100-0)/(4.3-1.8) = 40,得到温度( $y$ )和电压( $x$ )的关系表达式, $y=40\times(x-1.8)$ 。
最小能分辨的温度:0.0195 * 40 = 0.78 度。
10010001B = 91H = 145,所以 0.0195 * 145 = 2.83V。
(2.83V - 1.8V) * 40 = 41.2 度。
STM32 的 ADC 开发基础
STM32F103ZE 芯片(144 脚)中有 ADC1、ADC2、ADC3 共 3 个 12(4096) 位逐次逼近型模数转换器,具有 18 个测量通道,可测量 16 个外部和 2 个内部信号源(内部温度和内部参考电压)。这两个内部信号源只能连接到 ADC1。
各个通道的 AD 转换可以单次、连续、扫描或间断模式执行。
按照 AD 转换的组织形式来划分,ADC 的模拟输入通道分为规则组和注入组两种。
- 规则组:ADC 可以对一组最多 16 个通道按照指定的顺序逐个进行转换,这组指定的通道称为规则组。
- 注入组:在实际应用中,可能需要中断规则组的转换,临时对某些通道进行转换,好像这些通道注入了原来的规则组,故称注入组,最多由 4 个通道组成。
AD 转换结果有 2 种存储方式:左对齐、右对齐(默认)。
STM32CubeMX 中关于 ADC 的配置
(待补充)
查询方式和中断方式的 HAL 库函数应用
查询方式:阻塞式的 AD 转换
1
2
3
4
5
6unit16_t ADC_Value = 0; //定义一个 16 位的变量,接收 ADC 返回的结果
HAL_ADC_Start(&hadc); //启动 ADC,给它一个地址(通过参数告诉它启动的是哪一个 ADC)
if(HAL_OK == HAL_ADC_PollForConversion(&hadc, 10)) //转换过程函数,第一个参数是表示转换哪个 AD,第二个参数是表示超时的时间,执行完毕返回一个 OK
{
ADC_Value = HAL_ADC_GetValue(&hadc); //读取相应 AD 的转换结果。
}中断方式:非阻塞式的 AD 转换
1
2
3
4
5
6uint16_t ADC_Value = 0;
HAL_ADC_Start_IT(&hadc); //带有中断功能的启动函数,会调用一个中断回调函数
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc1) //AD 转换完成回调函数
{
ADC_Value = HAL_ADC_GetValue(&hadc);
}DMA
实训:ADC 单次数据采样与电压换算
在 F429 中进行 STM32 应用开发,完成以下的功能。
- 将 ADC_IN0 设置为 12 位 ADC,右对齐,启用中断。
- 分别用查询和中断这 2 种方式,每隔 0.5 秒采样一次 ADC 数据。
- 将每次读取到的 ADC 采样值转换为对应的电压值,发送到上位机。
- LED1 作为采样指示灯,在 ADC 转换过程中点亮,其余时间熄灭。
【注】配置 GPIO、ADC1、USART1。
- GPIO 比较好配置,就 LED0、LED1 的引脚设为 Output。
- 配置 ADC1,PA0 设为 ADC1_IN0,然后勾选 IN0。参数设置模块的 Data Alignment 默认 Right alignment(右对齐)即可,同样其他都默认,NVIC 中断使能勾选。
- 配置 USART1,Mode 选 Asynchronous(异步),参数设置模块波特率改为 9600 Bits/s,其他默认。由于串口没有用到中断,所以 NVIC 模块不需要使能。
1 | /* USER CODE BEGIN Includes */ |
STM32 的 OLED 开发基础
OLED 概述
- Organic Light-Emitting Display,有机发光显示
- OLED 具备自发光、厚度薄、视角广、功耗低、对比度高、响应速度快、可用于挠曲性面板、使用温度范围广、构造及其制作过程较简单等优异特性,并认为是一种比液晶显示更为先进的新一代平板显示技术。
- 基于 STM32 的 OLED 应用,要做那些事情
- 移植 OLED 的底层驱动函数库(针对不同的芯片,会有不同的库)
- 准备需要的中文字符和图片等数据
- 调用 OLED 驱动库中的底层函数进行应用开发
OLED 开发相关资源下载
- 基于 STM32CubeMX 的 OLED 屏驱动程序库(内含 4 个文件)
- XMF_OLED_STM32Cube.c:驱动程序的源文件
- XMF_OLED_STM32Cube.h:驱动程序的头文件
- XMF_OLED_Font.h:字库数据文件
- XMF_OLED_BMP.h:图片数据文件
- 取字模软件 PCtoLCD2002:生产字符和图片数据的工具
OLED 底层驱动函数移植
- 将 4 个驱动文件拷贝到工程文件中,和 main.c 放在同一目录,并将 XMF_OLED_STM32Cube.c 添加到工程代码文件中,并在 main.c 中引入头文件 XMF_OLED_STM32Cube.h。
- 根据所选用的芯片型号,修改 XMF_OLED_STM32Cube.h 头文件中所用的芯片头文件。
- 根据硬件电路原理图,修改 XMF_OLED_STM32Cube.h 中 OLED 的引脚定义。
- 查看 OLED_Init(void) 初始化函数的源码,根据电路接口和应用需要进行修改。
OLED 驱动库中常用的函数
OLED 初始化
1
void OLED_Init(void);
(未完待续……)